


Update zum Bodenanäherungssensor
Nach den guten Ergebnissen mit dem TFMini Plus habe ich das System ins Flugzeug eingebaut. Für die
Elektronik habe ich ein neues Gehäuse mit dem 3D Drucker entworfen.
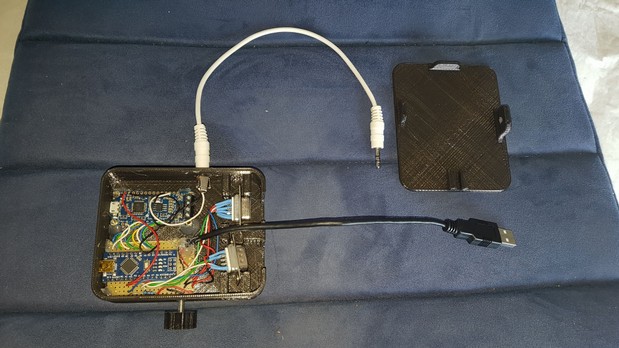
Neues Gehäuse mit Stromanschluss ( USB )
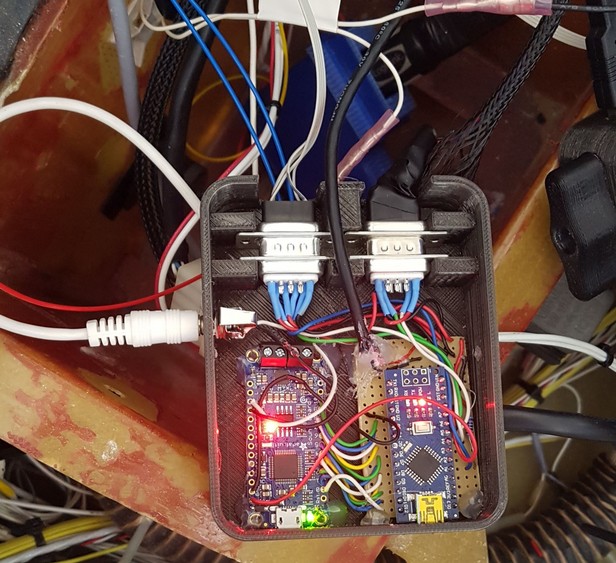
Das ganze wurde dann ins Flugzeug eingebaut und mit dem Sensor und Display verbunden

Display unter dem Dashboard - gut lesbar
Weiter ging es zum Flugtest. Die Software des Arduino wurde ein wenig geändert.
Die Höhe wird jetzt 20mal in der Sekunde gemessen.
Auch war das System so genau, dass ich die Höhe von 10 cm in das System integriert habe.
Es wurden einige Touch&Gos gemacht, sowie Überflüge über die Bahn. Es war möglich die Bahn in
niedriger Höhe ( 30 - 50 cm ) zu überfliegen.
Das Bodenanäherungssystem hat zuverlässig die Höhen ausgesprochen.
Kurz nach der Höhenaussage - 10 - ( 10 cm ) hat sich der Flieger dann auf den Boden gesetzt...
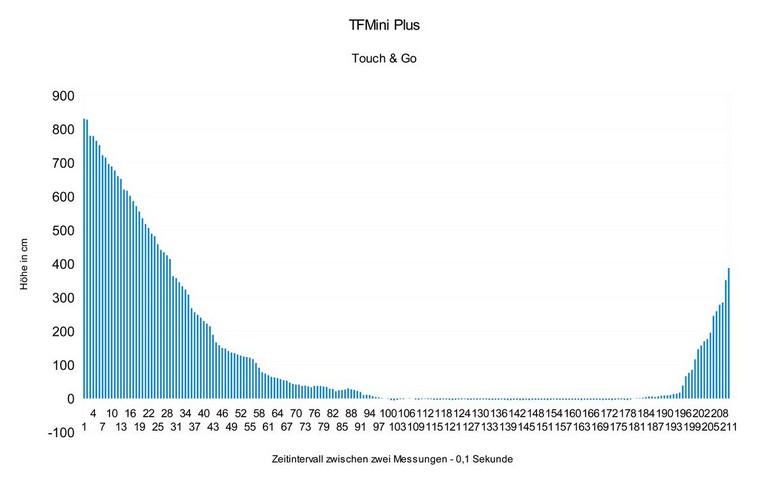
Hier ist noch ein Datenlog von einem Touch & Go. Die Datenrate war 10 Messungen in der Sekunde.
Neue Dateien
Fazit
Ich bin sehr zufrieden mit dem TFMini Plus.
Das System werde ich in den nächsten Wochen weiter testen.
Interessant wird werden, wie es bei Regen und Sturm arbeitet.
sehr interessant deine Landehilfe!
Ich fliege einen Kiebitz Eigenbau und habe auf fremden Plätzen oft das Problem aus großer Höhe kommend, eine saubere 3-Punktlandung hinzulegen, da ich aus dem Kiebitz nur seitlich Boden und keine Räder sehe.
Da ich aufgrund des offenen Cockpits ein aktives Headset habe, bringt mir ja ein Lautsprecher wenig.
Gibst du den Ton ins Funkgerät?
LG
Lutz